Arkusz kalkulacyjny „kalkulator obiektów” służy do wyszukiwania i obliczania położenia na fotografii potencjalnie widocznych obiektów. Pozwala to w szczególności na dokładną identyfikację obiektów industrialnych.
Zawiera bazę następujących obiektów:
- przeszkody lotnicze (5873 obiekty)
- stacje bazowe telefonii komórkowej BTS (23698)
- szczyty wzniesień w Polsce, Słowacji, Czechach, Ukrainie (Karpaty i Roztocze) oraz wschodniej części Niemiec (37969)
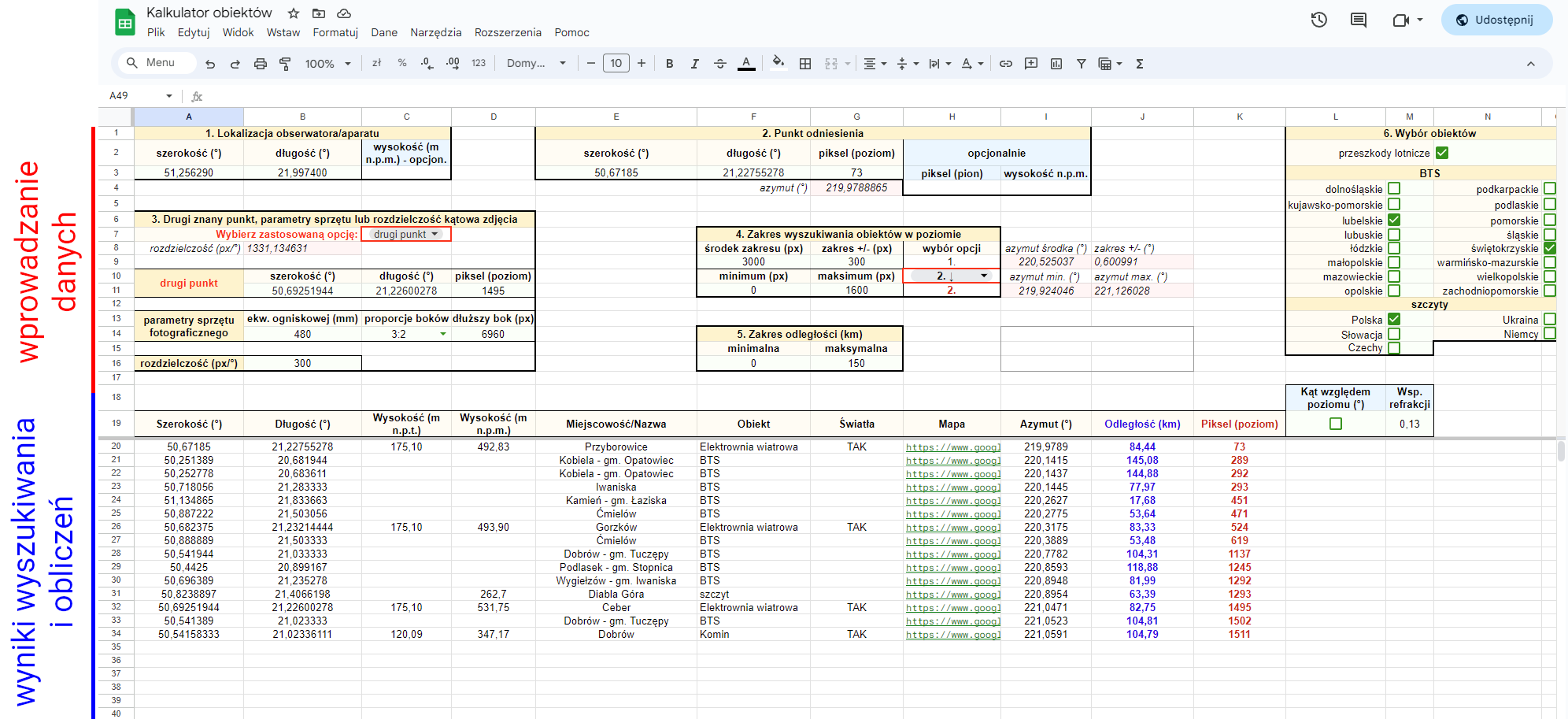
Arkusz składa się z dwóch części – górnej do wprowadzania danych oraz dolnej prezentującej listę obiektów z wynikami obliczeń.
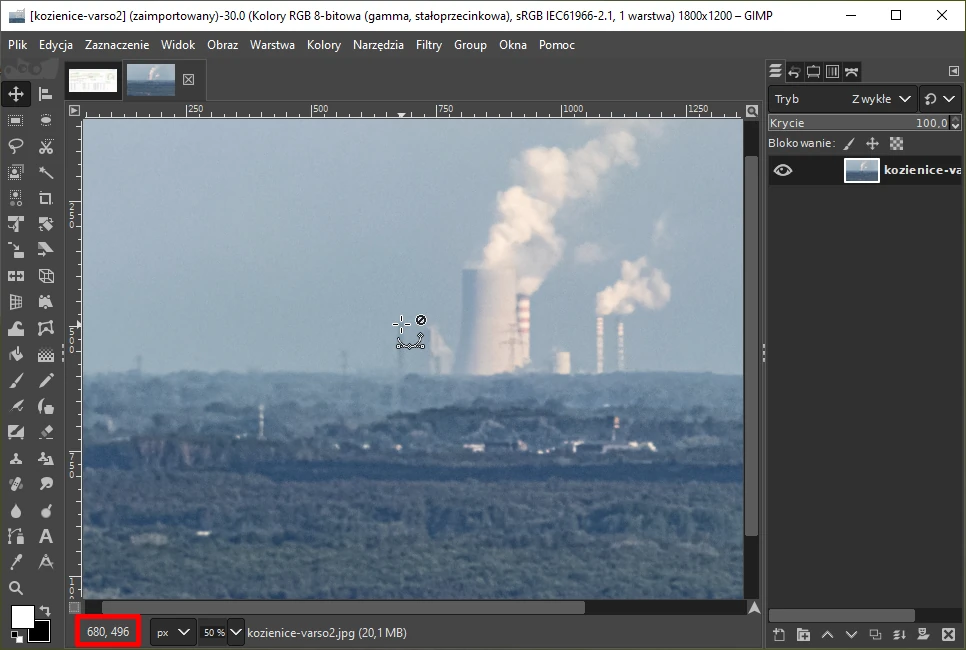
Występują w nim współrzędne pikseli:
- współrzędna pozioma (X) – odległość piksela od lewej krawędzi kadru
- współrzędna pionowa (Y) – odległość piksela od górnej krawędzi kadru
Można je odczytać wielu programach graficznych (np. GIMP, Paint, XnView), umieszczając kursor w danym punkcie.
Ilość niezbędnych danych jest dosyć duża, dlatego są podzielone na 6 części.
- Lokalizacja obserwatora/aparatu – współrzędne geograficzne punktu, z którego zostało zrobione zdjęcie. Dodatkowo można podać wysokość n.p.m., która jest potrzebna do obliczenia położenia punktów w osi pionowej.
- Punkt odniesienia. Do obliczeń wymagana jest obecność na zdjęciu przynajmniej jednego punktu o znanej lokalizacji. Należy tu podać jego współrzędne geograficzne, a także współrzędną poziomą piksela, a opcjonalnie także pionową i wysokość n.p.m. tego obiektu.
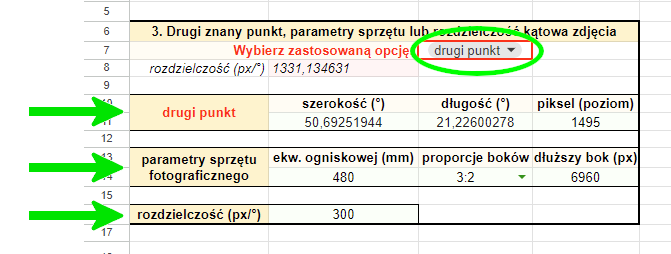
- Trzecia część służy do określenia rozdzielczości kątowej zdjęcia i można to zrobić na jeden z 3 sposobów:
- podać współrzędne geograficzne drugiego znanego punktu widocznego na zdjęciu oraz współrzędną poziomą piksela, na którym się znajduje
- podać ogniskową obiektywu przeliczoną na pełną klatkę (format 35 mm), proporcje boków matrycy i liczbę pikseli na dłuższym boku matrycy – ta metoda wymaga, aby zdjęcie miało pełną rozdzielczość (wtedy może być kadrowane) lub aby nie było kadrowane (wtedy może mieć zmniejszony rozmiar – podajemy wówczas liczbę pikseli na dłuższym boku zdjęcia, a nie matrycy)
- można też po prostu podać rozdzielczość zdjęcia w pikselach na stopień kątowy, obliczoną w dowolny inny sposób
Powyżej należy wybrać zastosowaną metodę z rozwijanej listy.
- Zakres wyszukiwania obiektów w poziomie – zakres poziomych współrzędnych pikseli, dla których będą wyszukiwane obiekty. Można go określić na dwa sposoby – wartość środkowa zakresu oraz jego szerokość lub wartość minimalna i maksymalna. Po prawej stronie należy wybrać używaną metodę (1. dla wartości środkowej i szerokości lub 2. dla wartości min. i max.).
 Z prawej strony, na różowym tle, znajdują się parametry przedziału przeliczone na stopnie (azymuty).
Z prawej strony, na różowym tle, znajdują się parametry przedziału przeliczone na stopnie (azymuty). - Zakres odległości – minimalna i maksymalna odległość do obiektów w kilometrach.
- Wybór obiektów. Tutaj zaznaczamy, jakie obiekty mają być wyszukiwane. Do wyboru są:
- przeszkody lotnicze w Polsce, czyli obiekty o wysokości co najmniej 100 m nad poziomem terenu, a w pobliżu dużych lotnisk także niższe
- stacje bazowe telefonii komórkowej (BTS) według województw
- szczyty wzniesień (w tym również gór) w Polsce, Słowacji, Czechach oraz części Ukrainy (całe Roztocze i ukraińskie Karpaty), a także wschodnia część Niemiec (na wschód od najdalej na zachód wysuniętego punktu Czech)
Po wpisaniu niezbędnych danych arkusz wyszukuje obiekty znajdujące się w danym zakresie odległości oraz azymutów odpowiadających podanemu zakresowi pikseli i dla każdego obiektu prezentuje następujące dane:
- szerokość i długość geograficzna obiektu
- wysokość obiektu nad poziomem terenu i nad poziomem morza (jeśli znajduje się w bazie)
- miejscowość w przypadku obiektów industrialnych lub nazwa w przypadku szczytu
- rodzaj obiektu
- obecność oświetlenia zgodnego z przepisami (dotyczy wyłącznie przeszkód lotniczych)
- link do Map Google z zaznaczonym obiektem
- azymut (według modelu Ziemi FAI, będącego kulą o promieniu 6371 km)
- odległość (według modelu Ziemi FAI)
- piksel w poziomie, czyli odległość od lewej krawędzi kadru
- opcjonalnie (po zaznaczeniu pola L19) kąt widzenia obiektu względem płaszczyzny poziomej dla miejsca obserwacji lub piksel w pionie, czyli odległość obiektu od górnej krawędzi kadru
Ostatni z wymienionych parametrów wymaga podania danych oznaczonych jako opcjonalne, które nie są potrzebne do pozostałych obliczeń:
- wysokość n.p.m. punktu, z którego wykonano zdjęcie oraz piksel w pionie (od górnej krawędzi kadru) jednego znanego punktu widocznego na zdjęciu – do obliczenia kąta względem poziomu
- jw. i dodatkowo wysokość n.p.m. tego obiektu – do obliczenia piksela w pionie
Różowe pola zawierają dodatkowe wyniki obliczeń – azymut punktu odniesienia, azymuty odpowiadające podanemu zakresowi pikseli oraz rozdzielczość zdjęcia.
Tytuł części kolumny L z wynikami obliczeń zmienia się automatycznie w zależności od tego, czy została wpisana wysokość obiektu w części 2. (komórka I4). Obliczenia te zakładają stałą refrakcję atmosferyczną, której współczynnik można zmienić w komórce M19.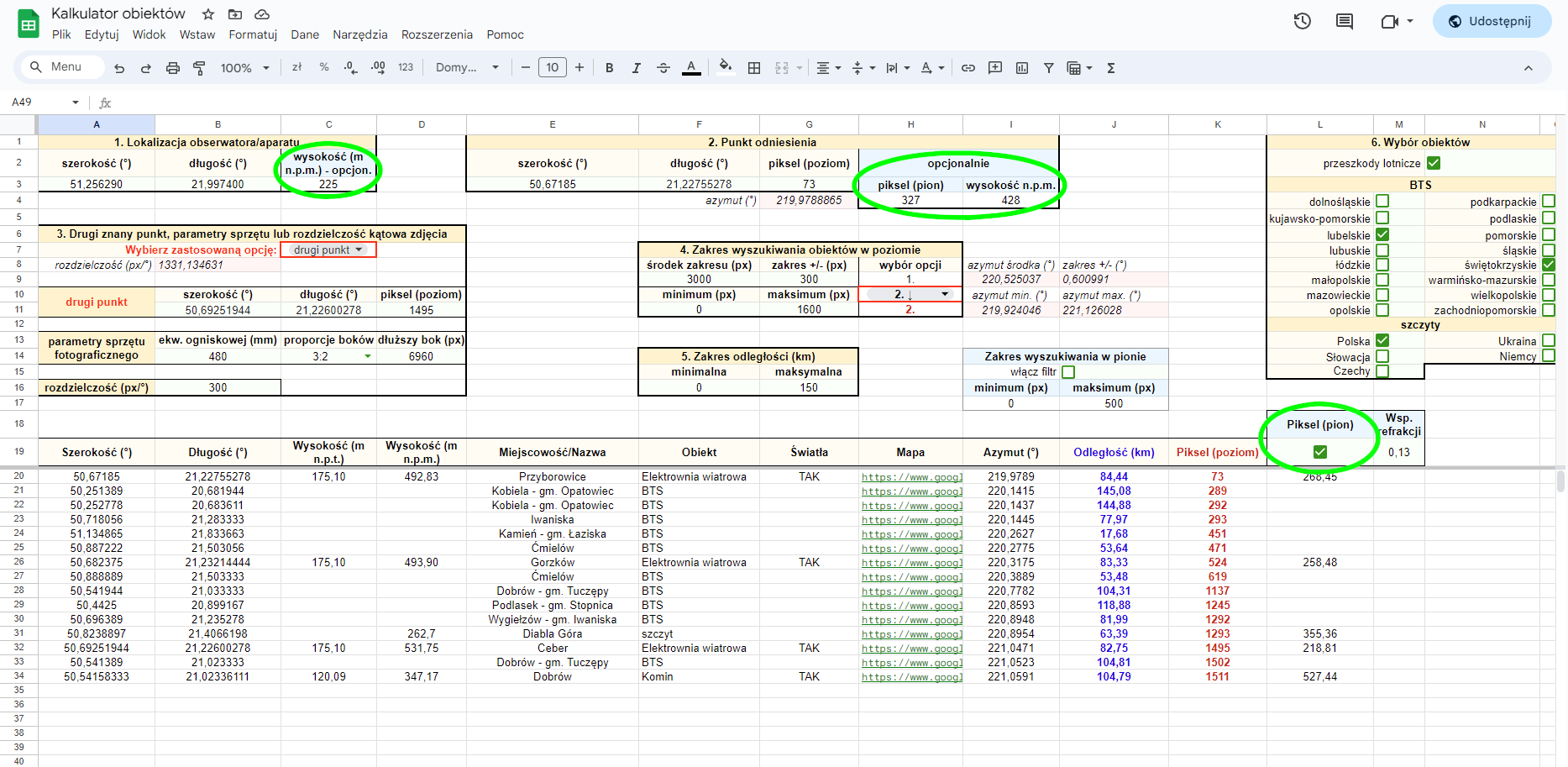
Po włączeniu obliczania pikseli w pionie pojawia się możliwość włączenia filtra zakresu wyszukiwania obiektów w pionie (nie są wówczas uwzględniane obiekty, dla których brakuje wysokości n.p.m.).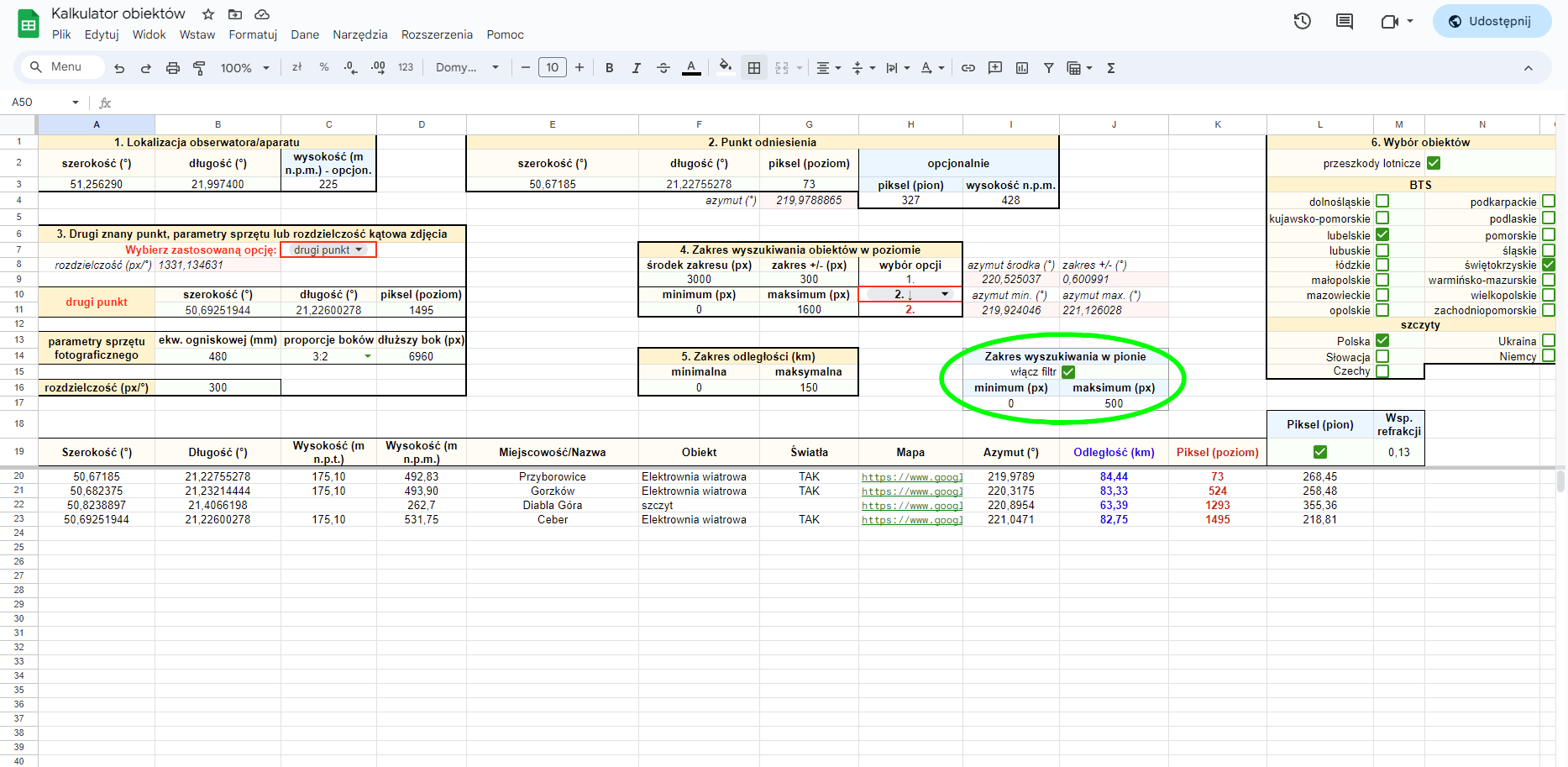
Obiekty identyfikujemy, porównując współrzędne pikseli, na których na zdjęciu znajdują się widoczne obiekty, z obliczonymi przez arkusz.